toate categoriile
-
Circuite integrate (IC)
Circuite integrate (IC)
- Interfață - senzor, atingere capacitivă(642)
- IC specializate(12302)
- PMIC - Regulatoare de tensiune - scop special(5644)
- PMIC - Regulatoare de tensiune - Controlere de reglementare liniare(793)
- PMIC - Regulatoare de tensiune - Linear + comutare(1829)
- PMIC - Regulatoare de tensiune - Linear(70981)
- PMIC - regulatoare de tensiune - regulatoare de comutare DC DC(39569)
- PMIC - regulatoare de tensiune - Controlere de comutare DC DC(13507)
- PMIC - referință de tensiune(9453)
- Convertoare PMIC - V / F și F / V(145)
- PMIC - Managementul termic(592)
- PMIC - Supervizori(47946)
- Convertoare PMIC - RMS la DC(170)
- PMIC - Controlere de alimentare, Monitoare(2104)
- Controlere PMIC - Power Over Ethernet (PoE)(1008)
- PMIC - Power Management - Specializat(7722)
- PMIC - Comutatoare de distribuție a puterii, drivere de încărcare(7706)
- PMIC - PFC (Corecția factorului de putere)(1222)
- PMIC - Controlere OR, diode ideale(705)
- PMIC - conducători auto, controlori(4712)
- PMIC - Iluminat, Controlere de balast(560)
- PMIC - Drivere LED(7282)
- PMIC - Drivere cu laser(573)
- PMIC - Controale Hot Swap(2816)
- PMIC - conducători de porți(7083)
- PMIC - Drivere complete, jumătate de pod(1342)
- PMIC - măsurarea energiei(654)
- PMIC - Drivere de afișare(1435)
- PMIC - Reglementare / Management actual(1481)
- PMIC - Managementul bateriilor(5553)
- PMIC - Încărcătoare de baterii(3831)
- Convertoare PMIC - AC DC, Switchers offline(4905)
- Memorie - Controlere(358)
- Memorie - Configurare Proms pentru FPGA(639)
- Memorie - Baterii(13)
- Memorie(65694)
- Logic - Funcții bus universale(706)
- Logic - Traducători, Schimbătoare de nivel(2854)
- Logica - Logica de specialitate(1870)
- Logică - Comutatoare de semnal, multiplexori, decodificatoare(9420)
- Logic - Shift Registre(2665)
- Logic - generatoare de paritate și dame(335)
- Logic - Multivibratori(831)
- Logic - Vane(3658)
- Logică - porți și invertoare - multi -funcție, configurabil(1687)
- Logic - Porți și Invertoare(16453)
- Logic - Flip Flops(7780)
- Logică - memorie FIFO(4240)
- Logică - contoare, divizoare(3456)
- Logică - Comparatoare(592)
- Logică - tampoane, drivere, receptoare, transceiver(17835)
- Procesare liniară - video(2909)
- Linear - Comparatoare(5084)
- Linear - Multiplicatori analogici, Divideri(263)
- Linear - Amplificatoare - Amperi și module video(1905)
- Linear - Amplificatoare - Scop special(1856)
- Linear - Amplificatoare - Instrumentație, amperi OP, amperi tampon(34236)
- Linear - Amplificatoare - Audio(4567)
- Interfață - Înregistrare vocală și redare(556)
- Interfață - UARTS (emițător de receptor asincron universal)(1237)
- Interface - Telecom(4467)
- Interfață - Specializată(4833)
- Interfata - terminatoare de semnal(333)
- Interfață - tampoane de semnal, repetitori, divizori(1449)
- Interfață - Serializatoare, deserializatoare(1480)
- Interfață - Interfețe senzor și detector(1524)
- Interface - Module(169)
- Interfață - Modems - ICS și module(407)
- Interfață - Expandere I / O(1136)
- Interfață - Filtre - activă(1226)
- Interfață - Encodere, Decodoare, Convertoare(714)
- Interfață - Drivere, Receptoare, Transmițătoare(20755)
- Interfață - sinteză digitală directă (DDS)(117)
- Interfață - Controlere(3628)
- Interfață - CODEC(1676)
- Interfață - comutatoare analogice, multiplexori, demultiplexori(12567)
- Interfață - comutatoare analogice - scop special(2533)
- Embedded - sistem pe chip (SoC)(4496)
- Embedded - PLD-uri (dispozitiv logic programabil)(971)
- Embedded - Microprocesoare(10083)
- Embedded - microcontrolere - specific aplicației(2275)
- Embedded - Microcontrolere(99285)
- Embedded - microcontroller, microprocesor, module FPGA(1527)
- Embedded - FPGAS (tablou de poartă programabilă de câmp) cu microcontrolere(81)
- Embedded - FPGA (Field Gateway Programable Array)(27747)
- Embedded - DSP (procesoare semnal digitale)(4081)
- Embedded - CPLDS (dispozitive logice programabile complexe)(5187)
- Achiziționarea datelor - Controlere cu ecran tactil(1210)
- Achiziționarea datelor - Converteri digitali la analogici (DAC)(14419)
- Achiziția datelor - potențiometre digitale(6250)
- Achiziționarea datelor - analog cu convertoare digitale (ADC)(17776)
- Achiziția de date - Frontul analogic (AFE)(787)
- Achiziția de date - ADC / DAC - scop special(3043)
- Ceas / Timp - Ceasuri în timp real(2446)
- Ceas/sincronizare - cronometre și oscilatoare programabile(23469)
- Ceas / Timing - Baterii IC(4)
- Ceas / Timp - linii de întârziere(1049)
- Ceas/sincronizare - generatoare de ceas, PLL, sintetizatoare de frecvență(32775)
- Ceas / Timing - Buffere de ceas, Drivere(4568)
- Ceas / Timp - Aplicație specifică(8652)
- Scop special pentru scopuri audio(1564)
Producător relevant







-
Produse semiconductoare discrete
Produse semiconductoare discrete
- Regulamentul actual - diode, tranzistoare(1090)
- Tranzistori - scop special(226)
- Tranzistori - Unijuncții programabile(48)
- Tranzistori - JFET-uri(1558)
- Tranzistori - IGBT - Single(4799)
- Tranzistori - Module IGBT(63420)
- Tranzistori - IGBT - Arrays(26)
- Tranzistori - FET, MOSFET - Single(48330)
- Tranzistori - FET, MOSFET - RF(4903)
- Tranzistori - FET, MOSFET - Arrays(6641)
- Tranzistori - Bipolari (BJT) - Unic, Pre-Biased(4539)
- Tranzistori - Bipolari (BJT) - Single(25800)
- Tranzistori - Bipolari (BJT) - RF(2087)
- Tranzistori - Bipolari (BJT) - Arrays, Pre-Biased(2115)
- Tranzistori - Bipolar (BJT) - Arrays(2310)
- Tiristoare - TRIAC(4044)
- Tiristoare - SCR - Module(3967)
- Tiristoare - SCR-uri(5436)
- Tiristoare - DIAC, SIDAC(319)
- Modulele Power Driver(1627)
- Dioduri - Zener - Single(87483)
- Dioduri - Zener - Arrays(2619)
- Diode - capacitate variabilă (varicaps, varactoare)(1200)
- Dioduri - RF(2753)
- Diode - Redresoare - Single(67528)
- Dioduri - Redresoare - Arrays(20581)
- Dioduri - punți redresoare(11700)
Producător relevant




-
RF / IF și RFID
RF / IF și RFID
- Carduri de identificare a abonaților (SIM)(77)
- Circulatoare și izolatoare RF(1742)
- RFID, acces RF, IC-uri de monitorizare(1550)
- Transpondere RFID, etichete(747)
- Module de citire RFID(464)
- Kituri de evaluare și dezvoltare RFID, consilii(30)
- Antene RFID(329)
- RFI și EMI - materiale de protecție și absorbție(6444)
- RFI și EMI - contacte, amprente și garnituri(7497)
- Transmițătoare RF(668)
- Module transceiver RF(6900)
- RF-uri de transceiver RF(4169)
- Comutatoare RF(9276)
- RF Shields(16401)
- Receptoare RF(1998)
- Receptor RF, emițător și unități terminate de transceiver(2763)
- RF separatoare de putere / splittere(1223)
- RF circuitele de comandă a puterii RF(86)
- Modulatoare RF(710)
- Mixere RF(2800)
- Circuite integrate RF și module(3276)
- Frontul RF (LNA + PA)(419)
- Seturi de evaluare și dezvoltare RF, consilii(747)
- RF Directional Coupler(2718)
- RF Diplexers(1464)
- Detectoare RF(412)
- RF Demodulatoare(249)
- Antene RF(12319)
- Amplificatoare RF(19651)
- balun(1496)
- atenuatoare(4852)
Producător relevant







-
optoelectronică
optoelectronică
- Optomecanic(480)
- Corpuri de iluminat(125)
- Diode cu laser, module laser - livrare laser, fibre laser(345)
- Sisteme cu laser Hene(31)
- Capete laser Hene(27)
- Afișați lumina de fundal(93)
- Xenon de iluminat(387)
- Ecranele cu ecranul tactil(453)
- Indicatoare de panou, lămpi pilot(75729)
- Optica - Sursă de lumină de la distanță Phosphor(269)
- Optica - Reflectori(665)
- Optica - Tevi luminoase(5384)
- Optica - Lentile(4951)
- LED-uri - Distanțiere, Standoffs(2718)
- LED-uri - Înlocuirea lămpilor(29718)
- LED -uri - Indicatori ai plăcii de circuit, tablouri, bare de lumină, grafice de bare(9083)
- LED Produse termice(667)
- Kituri de iluminat cu LED-uri(64)
- Lumini LED - alb(37580)
- Lumini LED - Culoare(4728)
- LED Lighting - COB-uri, Motoare, Module(28735)
- Indicare LED - Discret(27601)
- Diode laser, module(1553)
- Becuri - Incandescente, Neoane(311004)
- Lămpi - Fluorescent cu catod rece (CCFL) & amp;UV(164)
- invertoare(7728)
- Infraroșu, UV, emițătoare vizibile(3871)
- Fibră optică - Transmiters - Circuitul de acționare integrat(4085)
- Fibra optica - Transmițătoare - Discrete(350)
- Optica fibră optică - Module transceiver(18758)
- Fibră optică - comutatoare, multiplexori, demultiplexori(1387)
- Fibre optice - Receptoare(695)
- Fibra Optica - Attenuatoare(654)
- electroluminiscent(102)
- Afișaj, monitor - controler de interfață(98)
- Module de afișare - fluorescente cu vid (VFD)(249)
- Module de afișare - matrice și cluster cu led(865)
- Module de afișare - caractere LED și numerice(5421)
- Module de afișare - LCD, OLED, grafică(4654)
- Module de afișare - LCD, personaj OLED și numeric(2202)
- Afișează rame, lentile(88)
- Adresabil, Specialitate(458)
Producător relevant







-
Senzori, Traductoare
Senzori, Traductoare
- Receptoare cu ultrasunete, emițători - industrial(115)
- Senzori de temperatură - termostate - mecanice - industriale(3103)
- Senzori de temperatură - producție analogică și digitală - industrial(209)
- Senzori de proximitate - industrial(13611)
- Senzori de presiune, traductoare - industriale(26503)
- Senzori optici - fotonică - contoare, detectoare, SPCM (modul de numărare a fotonului unic)(751)
- Senzori optici - Module de cameră(875)
- Senzori magnetici - poziție, proximitate, viteză (module) - industrial(554)
- Senzori de forță - industrial(346)
- Senzori de flux - industrial(151)
- Float, Senzori de nivel - Industrial(310)
- Codificatoare - industrial(4980)
- Senzori de culoare - industrial(50)
- Senzori de atingere(100)
- Receptoare cu ultrasunete, transmițătoare(2421)
- Senzori de temperatură - Termostate - stare solidă(1096)
- Senzori de temperatură - Termostate - mecanice(3397)
- Senzori de temperatură - Termocuple, sonde de temperatură(1921)
- Senzori de temperatură - RTD (detector de temperatură de rezistență)(1525)
- Senzori de temperatură - termostori PTC(2273)
- Senzori de temperatură - termistori NTC(13259)
- Senzori de temperatură - ieșire analogică și digitală(3928)
- Aparate de măsurare a tensiunii(1399)
- Senzori specializați(1861)
- Celule solare(503)
- Senzori de șoc(84)
- Interfața senzorilor - Blocuri de conexiuni(2519)
- Cablu senzor - ansambluri(22011)
- Senzori de proximitate/ocupare - unități terminate(725)
- Senzori de proximitate(2860)
- Senzori de presiune, traductoare(11317)
- Senzori de poziție - unghi, măsurarea poziției liniare(6022)
- Senzori optici - ieșire logică - reflexivă(194)
- Senzori optici - ieșire analogică reflectorizantă(432)
- Senzori optici - Fototranzistori(1027)
- Senzori optici - PhotoIterrupters - Tip slot - Ieșire tranzistor(1427)
- Senzori optici - PhotoIterrupters - tip slot - ieșire logică(1215)
- Senzori optici - fotoelectrice, industriale(16763)
- Senzori optici - fotodiode(1543)
- Senzori optici - detectoare de fotografii - receptor la distanță(2605)
- Senzori optici - detectoare de fotografii - ieșire logică(146)
- Senzori optici - detectoare foto - celule CdS(74)
- Senzori optici - măsurarea distanței(377)
- Senzori optici - Lumină ambientală, IR, senzori UV(1305)
- multifuncțională(558)
- Senzori de mișcare - Vibrații(337)
- Senzori de mișcare - Comutatoare înclinate(67)
- Senzori de mișcare - optici(719)
- Senzori de mișcare - Inclinometre(175)
- Senzori de mișcare - IMUS (unități de măsurare inerțială)(416)
- Senzori de mișcare - giroscoape(214)
- Senzori de mișcare - Accelerometre(1911)
- Magneți - senzor potrivit(119)
- Magnete - Multipurpose(1965)
- Senzori magnetici - Întrerupătoare (stare solidă)(3700)
- Senzori magnetici - poziție, proximitate, viteză (module)(5199)
- Senzori magnetici - liniar, compas (IC)(1247)
- Senzori magnetici - busolă, câmp magnetic (module)(35)
- Transductoare LVDT (transformator diferențial variabil liniar)(204)
- Modulele transceiver IrDA(196)
- Senzori de imagine, aparat de fotografiat(2235)
- Umiditate, senzori de umiditate(1425)
- Senzori de gaz(1217)
- Forțele senzorilor(188)
- Senzori de debit(550)
- Plutitoare, senzori de nivel(1343)
- codificatoare(6357)
- Senzorii de praf(43)
- Traductoarele actuale(3455)
- Senzori de culoare(85)
- Amplificatoare(1905)
Producător relevant







-
Conectori, Interconectați
Conectori, Interconectați
- Conectori USB, DVI, HDMI(446)
- Conectori de iluminare în stare solidă(555)
- Prize pentru ICS, tranzistoare(953)
- Conectori conectabili(1221)
- Conectori fotovoltaici (panou solar)(136)
- Conectori de fibră optică(370)
- Conectori FFC, FPC (flexibil plat)(761)
- Conectori D-Sub, în formă de D(2887)
- Conectori coaxiali (RF)(2389)
- Conectori circulari(14162)
- Conectori de putere de tip lamă(273)
- Mufe și recipiente(2597)
- Conectori USB, DVI, HDMI - Adaptoare(572)
- Conectori USB, DVI, HDMI(4298)
- Terminale - Conectori de la sârmă la placă(217)
- Terminale - Conectori de sârmă(4322)
- Terminale - Conectori cu pinii de sârmă(328)
- Terminale - conectori pentru turret(1273)
- Terminale - Conectori specializați(2042)
- Terminale - conectori cu racorduri(3902)
- Terminale - Conectori de lipit(345)
- Terminale - Conectori cu șuruburi(745)
- Terminale - Conectori cu inel(12596)
- Terminale - Conectori dreptunghiulare(4747)
- Terminale - Conectează rapid, conectori de deconectare rapidă(8514)
- Terminale - PIN PC, conectori cu un singur post(3776)
- Terminale - recipiente cu pin PC, conectori de priză(5883)
- Terminale - Conectori de sârmă magnetică(1653)
- Terminale - Conectori pentru cuțite(112)
- Terminale - carcase, cizme(2850)
- Terminale - Conectori folie(108)
- Terminale - Baril, Conectori pentru bullet(1107)
- Terminale - Adaptoare(137)
- Terminale și tablouri de turret(1159)
- Terminal Junction Systems(2533)
- Blocuri terminale - Sârmă la bord(43615)
- Blocuri terminale - specializate(3722)
- Blocuri terminale - Distribuția puterii(847)
- Blocuri terminale - Montare pe panou(1359)
- Terminal Blocks - Module de interfață(1819)
- Blocuri terminale - Anteturi, prize și prize(119920)
- Blocuri terminale - Din Rail, Channel(9373)
- Terminal Blocks - Contacte(65)
- Blocuri terminale - Blocuri de barieră(47517)
- Terminal Blocks - Adaptoare(1059)
- Conectori de iluminare în stare solidă - contacte(271)
- Conectori de iluminare în stare solidă(1344)
- Socumete pentru ICS, tranzistoare - adaptoare(275)
- Prize pentru ICS, tranzistoare(22148)
- Shunts, Jumperi(907)
- Conectori dreptunghiulare - Arc de sarcină(7721)
- Rectangulare Conectori - carcase(43023)
- Conectori dreptunghiulari - anteturi, știft specialitate(6129)
- Conectori dreptunghiulari - anteturi, recipiente, prize feminine(229601)
- Conectori dreptunghiulari - anteturi, pini masculi(543338)
- Conectori dreptunghiulari - spânzurare gratuită, montare pentru panou(30142)
- Rectangular Connectors - Contacte(10681)
- Conectori dreptunghiulari - bord în sârmă directă la placă(2432)
- Rectangulare Conectori - Adaptoare(475)
- Dreptunghiular - bord la conectori de bord - anteturi, recipiente, prize feminine(9)
- Dreptunghiular - bord la conectori de bord - anteturi, pini de sex masculin(2)
- Conectori dreptunghiulari - distanțe de bord, Stackers (bord la bord)(238901)
- Conectori dreptunghiulare - tablouri, tip de margine, mezzanin (bord la bord)(37853)
- Conectori de intrare de alimentare - intrări, prize, module(10310)
- Conectori conectabili(6049)
- Conectori fotovoltaici (panou solar) - contacte(77)
- Conectori fotovoltaici (panou solar)(504)
- Conectori modulați - Blocuri de cablare(99)
- Conectori modulați - prize(1674)
- Conectori modulați - Carcase pentru prize(181)
- Conectori modulați - cilindri cu magneți(10152)
- Conectori modulați - cricuri(23416)
- Conectori modulați - Adaptoare(855)
- Conectori de memorie - Carduri PC - Adaptoare(21)
- Conectori de memorie - Socluri PC Card(3299)
- Conectori de memorie - Conectori de module inline(3390)
- Conectori LGH(764)
- Keystone - inserturi(2758)
- Keystone - Fatete, cadre(1926)
- Conectori cu greutate mare - inserturi, module(4190)
- Conectori grei - case, hote, baze(17226)
- Conectori cu greutăți mari - Rame(523)
- Contactori grei - contacte(1832)
- Conectori cu greutăți mari - ansambluri(671)
- Conectori fibră optică - carcase(919)
- Conectori fibră optică - Adaptoare(4455)
- Conectori pentru fibră optică(3001)
- Conectori FFC, FPC (Flat Flexible) - carcase(652)
- Conectori FFC, FPC (Flat Flexible) - contacte(202)
- Conectori FFC, FPC (flexibil plat)(18691)
- D-Sub, Conectori în formă de D - Terminatori(47)
- D-Sub, conectori în formă de D - carcase(12238)
- Conectori D-Sub, în formă de D - contacte(2714)
- Conectori D-Sub, în formă de D-Backshells, hote(5995)
- D-Sub, conectori în formă de D - adaptoare(1304)
- Conectori D-Sub(141346)
- Conectori în formă de D - Centronics(8770)
- Contacte, încărcare cu arc și presiune(630)
- Contacte - Multi scop(6196)
- Contacte - Cadru de ghidare(122)
- Conectori coaxiali (RF) - terminatori(1231)
- Conectori coaxiali (RF) - Contacte(480)
- Conectori coaxiali (RF) - Adaptoare(6386)
- Conectori coaxiali (RF)(25734)
- Circuite conectori - carcase(441226)
- Conectori circulari - Contacte(4737)
- Circuite conectori - Backsheli și cleme de cablu(53692)
- Conectori circulari - Adaptoare(8839)
- Conectori circulari(1196254)
- Conectori de margine pentru card - carcase(469)
- Conectori de margine a cardului - conectori de tablă de margine(672683)
- Card Connectors Edge - Contacte(325)
- Conectori de margine pentru card - Adaptoare(73)
- Conectori de putere de tip lamă - carcase(837)
- Conectori de putere de tip lamă - contacte(393)
- Conectori de putere de tip lamă(4163)
- Între adaptoarele de serie(649)
- Baril - Conectori de putere(935)
- Barrel - conectori audio(2432)
- Barrel - Adaptoare audio(92)
- Conectori cu banane și vârfuri - mufe, mufe(1644)
- Conectori de banane și vârfuri - posturi de legare(239)
- Conectori pentru banane și vârfuri - Adaptoare(75)
- Conectori de planșeu - specializați(45586)
- Conectori din spate - carcase(6863)
- Conectori de plan din spate - Metric greu, standard(6297)
- Conectori din spate - DIN 41612(9408)
- Backplane Connectors - Contacte(3583)
- Conectori din spate - inserturi ARINC(2357)
- Conectori din spate - ARINC(3789)
Producător relevant







-
rezistori
-
condensatori
condensatori
- Condensatoare electrolitice din aluminiu(16817)
- Trimere, condensatoare variabile(3151)
- Condensatoare de film subțiri(3473)
- Condensatoare de tantal(136103)
- Tantal - condensatori de polimeri(9778)
- Condensatoare de siliciu(320)
- Condensatoare de oxizi de nicobiu(330)
- Mica și condensatori PTFE(9101)
- Condensatoare de film(150406)
- Condensatoare electrice cu strat dublu (EDLC), supercapacitoare(2782)
- Condensatoare ceramice(833829)
- Rețele de condensatoare, Arrays(2383)
- Condensatoare electrolitice din aluminiu(125325)
- Condensatoare din aluminiu - polimer(7544)
Producător relevant






-
Transformatoare
Transformatoare
Producător relevant







-
izolatoarelor
-
Cristale, Oscilatoare, Rezonatoare
-
Întreruperi
Întreruperi
- Întrerupătoare de blocare(2893)
- Comutatoare de oprire de urgență (e-stop)(1160)
- Întrerupătoare de cablu(571)
- Comută întrerupătoare(33608)
- Comutatoare cu rotițe(742)
- Comutatoare tactile(14263)
- Snap Action, Limit Switches(28077)
- Comutatoare de diapozitive(5166)
- Comutatoare selector(9720)
- Întrerupătoare rotative(13850)
- Comutatoare Rocker(53790)
- Întrerupătoare cu buton - efect Hall(127)
- Comutatoare cu butoane(190826)
- Comutatoare de afișare programabile(39)
- Comutatoare de navigație, Joystick(1882)
- Comutatoare magnetice, reed(1399)
- Comutatoare tastatură(637)
- Comutatoare cu cheie(3684)
- Comutatoare DIP(7747)
- Componente comutate configurabile - obiectiv(1435)
- Componente de comutare configurabile - sursa de iluminare(1236)
- Componente de comutare configurabile - Bloc de contact(1401)
- Componente comutate configurabile - corp(16077)
- Deconectați componentele comutatoarelor(2567)
Producător relevant






-
relee
relee
- Relee de siguranță(1310)
- Reed-uri de reed(1735)
- Relee de înaltă frecvență (RF)(1190)
- Contactori (Solid State)(686)
- Contactori (electromecanice)(11952)
- Releele auto(1881)
- Solid State Relays(10652)
- Relee de semnal, până la 2 amperi(9149)
- Relee de relee(2075)
- Relee de putere, peste 2 amperi(31604)
- Module releu I / O(712)
- Module releu I / O - intrare(2)
- Module de relee I / O(247)
Producător relevant






















Selecteaza limba
Limba actuală
românesc
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Cum să controlați motoarele CC folosind circuitul integrat driver L293D
Timp: 2026/06/9
Căutați: 172
Controlul unui motor cu un microcontroler nu este la fel de simplu cu conectarea directă la un pin de ieșire. Cele mai multe microcontrolere nu pot furniza suficient curent pentru a conduce motoarele în siguranță, iar încercarea de a face acest lucru poate deteriora circuitul. L293D este unul dintre cele mai folosite circuite integrate driver de motoare în această situație. În acest articol, veți învăța ce este L293D, cum funcționează intern, specificațiile sale cheie, funcțiile pinilor, procesul de interfațare cu Arduino și multe altele.
Catalog
Driver motor H-Bridge dual L293D
L293D este un circuit integrat driver motor H-bridge dual, proiectat pentru a permite microcontrolerelor și circuitelor logice cu putere redusă să controleze sarcini cu curent mai mare. Acesta acționează ca un interfață între circuitul de control și sarcină, permițând comutarea fiabilă și reducând riscul de deteriorare a componentelor logice sensibile. Dispozitivul acceptă niveluri logice standard DTL și TTL, făcându-l compatibil cu multe microcontrolere și sisteme încorporate populare.
Circuitul integrat conține patru canale de driver care pot fi configurate ca două H-bridge, permițând controlul independent al două motoare CC sau al unui motor pas cu pas bipolar. Suportă tensiuni de alimentare a motorului de până la 36 V, curenți de ieșire continua de până la 600 mA pe canal și frecvențe de comutare de până la 5 kHz. L293D este disponibil într-un pachet compact cu 16 pini și rămâne o alegere populară pentru controlul motoarelor, prototipare și proiecte educaționale.
Caracteristici și specificații cheie
| Categorii |
Parametru |
Specificație |
| General |
Tip dispozitiv |
Driver / Circuit integrat driver motor H-Bridge dual L293D |
| Compatibilitate logică |
Compatibil DTL și TTL |
|
| Numărul de canale |
4 canale de driver |
|
| Numărul de H-Bridge |
2 |
|
| Frecvența maximă de comutare |
5 kHz |
|
| Caracteristici |
Control activare |
Da |
| Protecție la supratemperatură |
Da |
|
| Dioda de clampare internă |
Da |
|
| Imunitate la zgomot ridicată |
Tensiune de intrare logică "0" de până la 1,5 V |
|
| Electric |
Tensiunea de alimentare a motorului (Vs) |
36 V Max |
| Tensiunea de alimentare logică (Vss) |
36 V Max |
|
| Tensiune de intrare (Vi) |
7 V Max |
|
| Tensiune de activare (Ven) |
7 V Max |
|
| Curent continuu de ieșire |
600 mA pe canal |
|
| Curent de ieșire de vârf (100 μs non-repetitiv) |
1.2 A pe canal |
|
| Disiparea totală a puterii (Ptot) |
4 W |
|
| Termic |
Temperatura de stocare (Tstg) |
-40°C până la +150°C |
| Temperatura de joncțiune (Tj) |
-40°C până la +150°C |
|
| Pachet |
Pachet cu găuri de trecere |
PowerDIP-16 (L293D) |
| Pachet montat pe suprafață |
SO-20 (L293DD) |
|
| Număr de pini |
16 pini (PowerDIP) |
|
| Disiparea căldurii |
Pinii centrali conectați pentru disiparea căldurii |
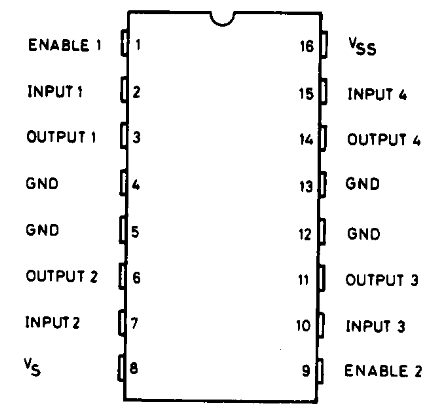
Detalii și funcții despre pini L293D
| Pin Nr. |
Nume pin |
Tip |
Funcție |
| 1 |
Activare 1 (EN1) |
Intrare |
Activează Driverul 1 și Driverul 2. Trebuie să fie HIGH pentru ca Ieșirile 1 și 2 să opereze. Poate fi folosit pentru controlul vitezei PWM. |
| 2 |
Intrare 1 (IN1) |
Intrare |
Intrare de control logic pentru Ieșirea 1. Determină direcția motorului atunci când este utilizată cu Intrarea 2. |
| 3 |
Ieșire 1 (OUT1) |
Ieșire |
Ieșirea driverului conectată la un terminal al motorului sau sarcinii. |
| 4 |
GND |
Putere |
Conexiune la masă pentru dispozitiv. |
| 5 |
GND |
Putere |
Conexiune la masă pentru dispozitiv. |
| 6 |
Ieșire 2 (OUT2) |
Ieșire |
Ieșirea driverului conectată la celălalt terminal al motorului sau sarcinii. |
| 7 |
Intrare 2 (IN2) |
Intrare |
Intrare de control logic pentru Ieșirea 2. Funcționează cu Intrarea 1 pentru controlul direcției. |
| 8 |
Vs |
Putere |
Intrare de tensiune de alimentare a motorului. Suportă tensiuni de motor de până la 36 V. |
| 9 |
Activare 2 (EN2) |
Intrare |
Activează Driverul 3 și Driverul 4. Trebuie să fie HIGH pentru ca Ieșirile 3 și 4 să opereze. Poate fi folosit pentru controlul vitezei PWM. |
| 10 |
Intrare 3 (IN3) |
Intrare |
Intrare de control logic pentru Ieșirea 3. Determină direcția motorului atunci când este utilizată cu Intrarea 4. |
| 11 |
Ieșire 3 (OUT3) |
Ieșire |
Ieșirea driverului conectată la un terminal al celui de-al doilea motor sau sarcinii. |
| 12 |
GND |
Putere |
Conexiune la masă pentru dispozitiv. |
| 13 |
GND |
Putere |
Conexiune la masă pentru dispozitiv. |
| 14 |
Ieșire 4 (OUT4) |
Ieșire |
Ieșirea driverului conectată la celălalt terminal al celui de-al doilea motor sau sarcinii. |
| 15 |
Intrare 4 (IN4) |
Intrare |
Intrare de control logic pentru Ieșirea 4. Funcționează cu Intrarea 3 pentru controlul direcției. |
| 16 |
Vss |
Putere |
Intrare de tensiune pentru alimentarea logică (de obicei 5 V) pentru circuitele interne de control. |
Diagrama bloc funcțională L293D
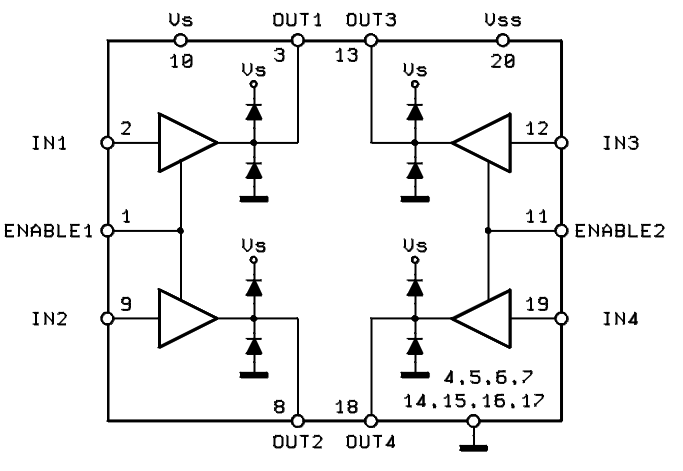
Diagrama bloc funcțională arată cum semnalele de control călătoresc prin L293D pentru a opera o sarcină conectată. Când un semnal logic este aplicat la unul dintre pini de intrare, acesta intră în circuitele interne de control, care procesează semnalul și determină starea driverului de ieșire corespunzător. Etapa de ieșire folosește apoi tensiunea de alimentare a motorului pentru a livra curentul necesar sarcinii conectate la pinii de ieșire.
Diagrama ilustrează, de asemenea, modul în care fiecare pereche de intrări și ieșiri formează un driver H-bridge. Prin schimbarea stărilor logice ale intrărilor, curentul poate curge prin sarcină în diferite direcții, permițând rotația motorului înainte și înapoi. Pinii de activare acționează ca porți de control pentru fiecare secțiune H-bridge și pot fi folosiți pentru a porni sau opri ieșirile sau pentru a aplica semnale PWM pentru controlul vitezei. Acest flux de semnal de la intrare la ieșire permite L293D să ofere comutare bidirecțională controlată pentru aplicații de conducere a motorului.
Procesul de interfață L293D Arduino
Diagrama de cablare de bază arată un Arduino Uno conectat la un circuit integrat driver de motor L293D, care este utilizat pentru a controla două motoare CC. Arduino oferă semnalele de control logic, în timp ce o sursă de alimentare separată de 5 V furnizează curentul necesar motoarelor. L293D acționează ca o interfață între pinii Arduino cu putere scăzută și sarcinile de motor cu curent mai mare. Pinii de intrare pe L293D primesc semnale de control de la Arduino, în timp ce pinii de ieșire se conectează direct la motoare. Atât Arduino, cât și sursa de alimentare externă trebuie să împărtășească o masă comună pentru a asigura funcționarea corectă.
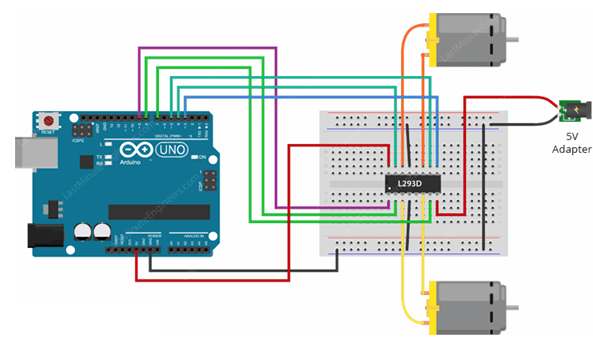
Viteza motorului poate fi controlată folosind Modularea lățimii de impuls (PWM). În această metodă, Arduino trimite un semnal PWM la unul dintre pinii de activare L293D. Schimbând ciclul de lucru PWM, tensiunea medie aplicată motorului se schimbă, permitând ajustarea lină a vitezei fără a modifica tensiunea de alimentare.
Direcția motorului este controlată prin pinii de intrare. De exemplu, setarea IN1 HIGH și IN2 LOW determină motorul să se rotească într-o direcție, în timp ce inversarea nivelurilor logice determină motorul să se rotească în direcția opusă. Aplicarea aceluiași nivel logic la ambele intrări poate opri sau frâna motorul, în funcție de configurația circuitului.
Una dintre cele mai comune greșeli de programare este uitarea de a configura pinul de activare ca ieșire sau lăsarea lui pe LOW, ceea ce împiedică funcționarea motorului. Atribuțiile incorecte ale pinilor în cod pot cauza, de asemenea, comportamente neașteptate ale motorului. O altă problemă frecventă este neîmpărtășirea unei grounds comune între Arduino și sursa de alimentare a motorului, rezultând în operațiuni instabile sau lipsa răspunsului motorului.
L293D vs Alte IC-uri pentru Controlul Motorului
| Specificație |
L293D |
L298N |
TB6612FNG |
DRV8833 |
BTS7960 |
| Tip de Controler |
Pod H Dual |
Pod H Dual |
Pod H Dual |
Pod H Dual |
Pod H Complet |
| Tensiune de Alimentare a Motorului |
4.5 V la 36 V |
5 V la 46 V |
4.5 V la 13.5 V |
2.7 V la 10.8 V |
5.5 V la 27 V |
| Tensiune de Logică |
4.5 V la 7 V |
5 V |
2.7 V la 5.5 V |
2 V la 7 V |
3.3 V la 5 V |
| Curent Ieșire Continu |
600 mA/canal |
2 A/canal |
1.2 A/canal |
1.5 A/canal |
43 A |
| Curent Ieșire de Vârf |
1.2 A/canal |
3 A/canal |
3.2 A/canal |
2 A/canal |
55 A |
| Diode de Protecție Internă |
Da |
Nu |
Da |
Da |
Da |
| Protecție Termică |
Da |
Da |
Da |
Da |
Da |
| Suport PWM |
Da |
Da |
Da |
Da |
Da |
| Tehnologia de Ieșire |
Transistori Bipolari |
Transistori Bipolari |
MOSFET |
MOSFET |
MOSFET |
| Eficiență |
Mică |
Mică |
Mare |
Mare |
Foarte Mare |
| Cădere de Tensiune |
Mare (≈1.2–1.8 V pe fiecare parte) |
Mare (≈2–4 V total) |
Mică (<0.5 V typical) |
Mică (<0.4 V typical) |
Foarte Mică |
| Generare de Căldură |
Mare |
Mare |
Mică |
Mică |
Mică |
| Răcitor Extern Necesari |
De obicei Nu |
Frecvent Necesari |
Rar Necesari |
Rar Necesari |
Necesari la Curent Mare |
| Numărul de Motoare DC |
2 |
2 |
2 |
2 |
1 Motor de Înaltă Putere |
| Cel Mai Bun Pentru |
Motoare DC Mici, Proiecte Educaționale |
Motoare de Putere Medie |
Roboți, Dispozitive pe Bază de Baterie |
Designuri Portabile Compacte |
Motoare de Înalte Putere și Robotică |
Aplicații Tipice și Cazuri de Utilizare
Proiecte Educaționale și Arduino
L293D este folosit pe scară largă în proiectele educaționale și platformele de învățare bazate pe Arduino. Interfața sa simplă permite începătorilor să controleze motoare DC și să învețe concepte de bază, cum ar fi controlul direcției motorului, controlul vitezei PWM și funcționarea podului H fără a necesita circuite complexe.
Roboți Mobili Mici
Multe vehicule robotizate mici folosesc L293D pentru a conduce două motoare DC independent. Acest lucru permite robotului să se deplaseze înainte, înapoi, să vireze la stânga și să vireze la dreapta, controlând direcția și viteza fiecărui motor separat.
Controlul Motorului Pas cu Pas
Arhitectura duală a podului H a L293D poate fi utilizată pentru a controla motoare pas cu pas bipolare. Prin energizarea în bobinele motorului într-o succesiune specifică, controlerul permite mișcarea precisă pas cu pas pentru aplicații de poziționare.
Conducerea Releelor și Solenoidelor
L293D poate conduce relee și solenoide care necesită mai mult curent decât un pin de ieșire al microcontrolerului poate oferi. Diodele de protecție integrate ajută la suprimarea vârfurilor de tensiune generate atunci când aceste sarcini inductive sunt comutate.
Sisteme de Control Automatizate
În sistemele simple de automatizare, L293D este folosit pentru a controla actuatori mici, valve și dispozitive mecanice. Controlerul oferă o modalitate ușoară de interfațare a circuitelor logice cu sarcini electromechanice.
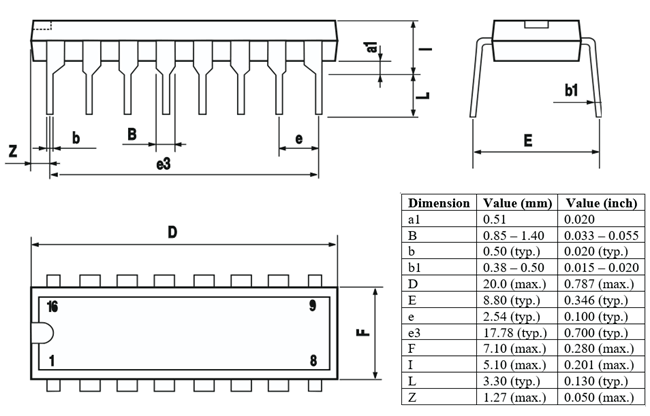
Dimensiuni Mecanice
Producător
STMicroelectronics este unul dintre cei mai importanți producători de semiconductori din lume, având zeci de ani de experiență în proiectarea și producerea circuitelor integrate analogice, de gestionare a energiei, de control al motorului și mixed-signal. Pentru produse precum circuitul integrat de pilotare a motorului L293D, STMicroelectronics folosește procese de fabricație mature pentru a asigura o performanță electrică consistentă, fiabilitate, stabilitate termică și disponibilitate pe termen lung a produsului. Capacitățile sale de fabricație sunt susținute de resurse extinse de cercetare și dezvoltare, sisteme de producție automatizate și conformitate cu standardele internaționale de calitate și mediu.
Întrebări frecvente [FAQ]
1. De ce are L293D pini separați pentru alimentarea logică și pentru motor?
L293D utilizează surse de alimentare separate astfel încât circuitul logic și circuitul motorului să poată funcționa la tensiuni diferite. Acest lucru permite unui microcontroler la tensiune joasă să controleze un motor la tensiune mai mare fără a expune circuitele de control la tensiunea de alimentare a motorului.
2. Cum se protejează L293D de vârfurile de tensiune generate de motoare?
L293D include diode de clampare interne care absoarbă tensiunea inversă produsă atunci când o sarcină inductivă este deconectată. Aceste diode ajută la prevenirea deteriorării driverului și îmbunătățesc fiabilitatea generală a circuitului.
3. De ce un motor condus de L293D funcționează adesea mai lent decât se așteaptă?
L293D folosește etape de ieșire cu tranzistor bipolar care creează o cădere de tensiune între sursa de alimentare și motor. Ca urmare, motorul primește o tensiune mai mică decât cea furnizată de sursa de alimentare, ceea ce poate reduce viteza și cuplul.
4. Poate L293D să controleze două motoare independent, la viteze diferite?
Da. Fiecare secțiune a podului H poate fi controlată separat. Aplicând semnale PWM diferite la pinii de activare, fiecare motor poate funcționa la propria sa viteză și direcție.
5. Ce se întâmplă dacă pinul de activare rămâne deconectat?
Ieșirile corespunzătoare pot rămâne dezactivate sau pot funcționa imprevizibil. Pinul de activare ar trebui să fie conectat la un semnal definit HIGH sau PWM pentru a asigura un control corect al motorului.
6. De ce este necesar un pământ comun între Arduino și sursa de alimentare a L293D?
Un pământ comun oferă o referință de tensiune partajată între circuitul de control și driverul de motor. Fără acesta, semnalele logice pot să nu fie interpretate corect, provocând o funcționare nesigură.
7. Când ar trebui să alegi un driver de motor modern în locul L293D?
Pentru dispozitive alimentate cu baterii, motoare cu curent mare sau aplicații care necesită eficiență maximă, driverii moderni pe bază de MOSFET, cum ar fi TB6612FNG sau DRV8833, sunt adesea alegeri mai bune deoarece generează mai puțină căldură și pierd mai puțină energie.
Articol înrudit
-
![Procesul de fabricare a circuitelor integrate pas cu pas]() Jun 09 2026
Jun 09 2026 -
![Impedanța de intrare și impedanța de ieșire în amplificatoare operaționale]() Jun 09 2026
Jun 09 2026
legate de produse

CGA6M2X7R2A334M200AA
CAP CER 0.33UF 100V X7R 1210

08055A471J4T2A
CAP CER 470PF 50V NP0 0805

12061A270GAT4A
CAP CER 27PF 100V C0G/NP0 1206

1062-20-0144
CONN SOCKET 16-22AWG GOLD CRIMP

VBO25-16NO2
BRIDGE RECT 1P 1.6KV 38A FO-A

XR33055HDTR-F
IC TRANSCEIVER HALF 1/1 8SOIC

TJA1051T/1J
IC TRANSCEIVER HALF 1/1 8SO

OP2177ARMZ-REEL
IC OPAMP GP 2 CIRCUIT 8MSOP

LM3704YCMMX-308/NOPB
IC SUPERVISOR 1 CHANNEL 10VSSOP

NJM12903R
NJM12903R JRC

VI-PAWW-CUU-01
VICOR New

MT60CB16T1
Thyristors - SCRs - Modules T1 6
